Aerospace Engineering


| Aviation Safety of Metallic and Composite Structures |
| Digital twin: Residual Life and Residual strength estimation |
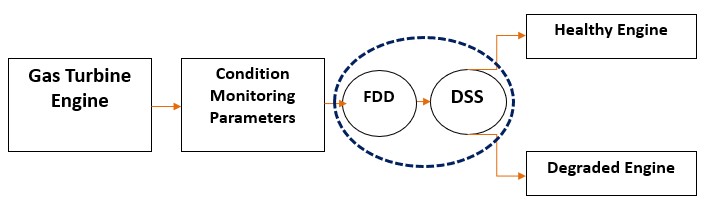
| Gas Turbine Engine Fault Detection and Diagnosis |
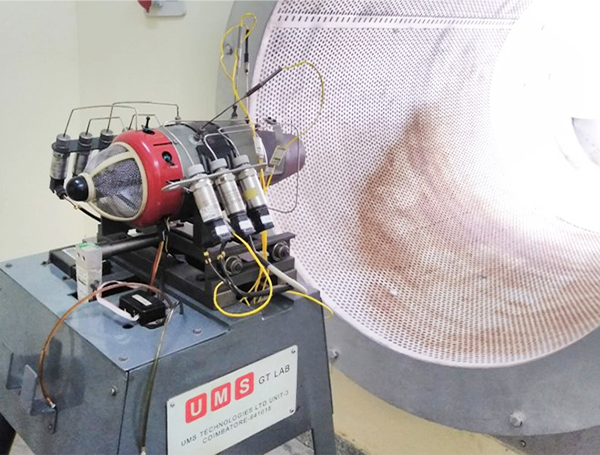
| Investigation of Stall Characteristics of Small Gas turbine Engines |
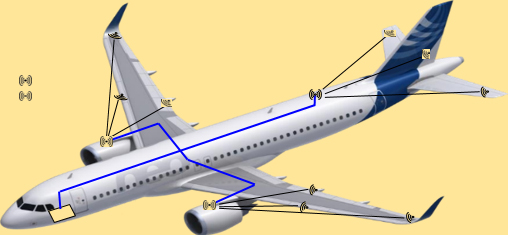
| Wireless Intra-Aircraft Communication |
| GNSS based application for imaging and navigation |
| Dynamic Level of Aero-structures |
| Aerodynamic Characterization of Airfoils at Low Reynolds Number |
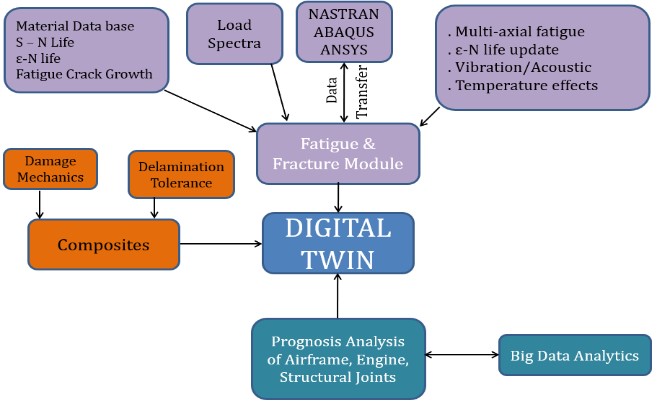
The research problem for Structural Health Monitoring (SHM) is proposed to be addressed through identifying methods consisting of the state of the art modeling technique, development of the neural network model, training the model and building adequate robustness into the model through the computational research work being undertaken.
The activity in SHM has primarily two parts. The first one refers to damage identification and the second part deals with damage growth or prognosis to determine the remaining life of a damaged component using computational techniques. Besides the airframe of an aircraft, Gas Turbine engines are safety-critical systems that require continuous monitoring of the state of the system to avoid catastrophic failures.
The total work on SHM consists of the acquisition of data from aircraft in terms of the loads and carry out prognostic analysis to predict damage growth to estimate the remaining life of the structure as a whole and for critical components.
The convergence of technologies in the field of Command, Communication, Computers, Control, and intelligence (C4I) resulted in the emergence of the C4I system. The basic purpose of the C4I system is to destroy the enemy targets completely and thus paralyze the enemy. In order to expose and destroy camouflaged effects of adverse weather conditions, multi-sensor inputs are required to be coordinated and processed. A control center of a typical C4I system with facilities to identify the potential targets by acquiring multi-sensor inputs and processing these inputs using data fusion and image processing technique will be simulated. The research work envisaged involve concept development of sensor fusion and C4I system and associated embedded systems.
The major objectives of the research work involves, the schemes of fusion that can be investigated are:
The investigation on C4I system development comprises advanced visualization capabilities, analytic tools, knowledge management and database design.
Gas Turbine engines are safety-critical systems that require continuous monitoring of the state of the system to avoid catastrophic failures. There are several techniques developed for ensuring the flight safety. Condition Based Monitoring is one such technique for ensuring flight safety. In the context of a typical aero engine, a research project as given below has been formulated.
Develop a state of the art diagnostic neural network model for an engine utilizing the data captured through the engine performance deck and the engine test data.
The above-stated research problem is proposed to be addressed through literature survey to identify the state of the art modeling technique, development of the neural network model, training the model and building adequate robustness into the model through the research work being undertaken.
Development of support structure to air traffic management (ATM) using unmanned air system (UAS) platforms. This is a potential area for intensive research pertaining to Aviation safety.
Global and local (or reactive) obstacle avoidance across unmanned aerial vehicle (UAV) altitudes is a challenging problem. When a camera vision is available, techniques to determine obstacle positions in an inertial frame are available. Hence a requirement in vertical (pitch) plane is to plan vehicle positions different from these obstacle positions. A challenge in this problem setup is that the nonlinear behavior of UAV is so unpredictable that planning such vehicle positions in reactive obstacle positions becomes extremely difficult. However, in global obstacle avoidance, when the obstacle positions in configuration space are available a priori, UAV positions that avoid the obstacles are synthesized offline.
The second part is the path planning scheme as and when an obstacle position is sensed. This is the preliminary work required for reactive obstacle avoidance problem. The whole gamut of path planning schemes addressed without integrating them with the vehicle dynamics will be taken into consideration.

| Sl. No. | Guide name | Ongoing | Completed |
|---|---|---|---|
| 1 | Prof. NGR Iyengar | Dr. Ramesh Gabbur | |
| 2 | Prof. Dattaguru | Dr. L. Chikmath | |
| 3 | Dr. Ramprasad | ||
| 4 | Savitha N Nambisan | ||
| 5 | M R Shankar | ||
| 6 | K S Vishwanath | ||
| 7 | Syed Imtiaz * | ||
| 8 | Jagapathi Babu Batchu * | ||
| 9 | Prof. A R Upadhya | Biju B L | |
| 10 | Syed Imtiaz * | ||
| 11 | Jagapathi Babu Batchu * | ||
| 12 | Prof. Antonio Davis | Dr. Jagadish Babu | |
| 13 | Johney Thomas | ||
| 14 | Vamsi Krishna Chowduru * | ||
| 15 | Suresh P * | ||
| 16 | Prof. Natarajan | Gp. Capt. Peter Reji Ramnatt | |
| 17 | Swathi Pennappa Reddy | ||
| 18 | Peter Reji Ramanatt | ||
| 19 | Kapil Rathi | ||
| 20 | Samuel Vivek Williams | ||
| 21 | Vani K R | ||
| 22 | Dr. Raju Garudachar | Dr. S. Charulatha | |
| 23 | S Ramesh Raju | ||
| 24 | Nathiya OK | ||
| 25 | Parashurama K | ||
| 26 | G Ramarao | ||
| 27 | Prof. A R Manjunath | Giri Pallavi | |
| 28 | Thimmereddigari Paramesh | ||
| 29 | Prof. Amalesh Barai | Naveen Kumar R | |
| 30 | Shashi Kumar S | ||
| 31 | Gokul Sundar | ||
| 32 | Prof. P A Aswatha Narayana | Dr. Ilavarasu | |
| 33 | Dr. Ashish Gupta | ||
| 34 | Venkatadri S | ||
| 35 | Dr. Allamaprabhu C Y | Vamsi Krishna Chowduru * | |
| 36 | Suresh P * | ||
| 37 | Sreedhar Karunakaran |
Co-guides are appointed
| Sl. No. | Principal Investigator / Co-Investigator | Title of the project | Applied Agency | Duration Total Years / Months (From & To) | Amount (Lakh) | Status |
|---|---|---|---|---|---|---|
| 1 | PI: Dr. Natarajan | IOT Enabled Sensors and Hybrid Power Generation | KCTU | 27-08-2018 | 37.9575 | Ongoing |
| 2 | PI: Dr. Antonio Davis Co-PI: Dr.Allamaprabhu | Investigation of Stall Characteristics and Surge Detection in Small Gas Turbine Engines | GTRE, DRDO | From 03-11-2019 Duration 30 Months | 45.66 | Ongoing |
| 3 | PI: Prof. B Duttaguru Co-PI: Dr. A.R.Upadhya, Mr.Ashok Bakshi,Mr. K S Viswanath | Prognosis analysis of Crack initiation and growth in non-linear problems of structural joints as a part of development of digital twin | ARDB | From 02-02-2020 Duration 36 months | 28.79 | Ongoing |
| Sl. No. | Model | Photo | Guide | Student | Title |
|---|---|---|---|---|---|
| 1 | Quad-copter |

|
Samuel Vivek W | B.A Rashika Kishan S Rana Shamail N Shaik Mansoor Ali | Design, Fabrication of a drone for medical emergencies |
| 2 | Quad-copter using Go-Pro camera for close range surveillance |  |
Samuel Vivek W | Hruday Kundal Wilbur Gonsalves Sammed | Videography, QR code scanning. |
| 3 | Flight Simulator |

|
Naveen Kumar.R | Gokhul Rajamatha | The simulator is designed and fabricated by Aerospace department under research collaboration with IIAAT, Russia for training students and faculties on different Aircrafts to get Virtual exposure in the simulator |
| 4 | Additive Manufacturing Facility |  |
Vamshi Krishna.C | 3D printing of polymers and metal for UAV’s and MAV’s. | |
| 5 | Small Gas Turbine Test Facility |

|
Allamaprabhu | Akhil D Abhay Veer Singh | CFD analysis of flow conditions inside small gas turbine test cell. |
| 6 | IOT Enabled Smart sensor test bed | 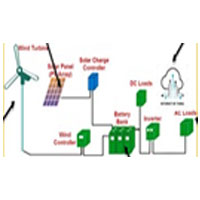 |
Dr. K. Natarajan | Kiran Alex | For smart grid application For green and smart Smart campus |
| 7 | MEM’s navigation system |

|
Charulatha | Navya | Determination of accuracy of GPS |
| 8 | Recycling of GFRP Composites (Electronic Waste) |  |
Amritharaju. V | Vinayak Joshi Shivam Abhay | Estimation of strength properties for re-cycled components. |
| 9 | Development of Super Inductor |

|
Samuel Vivek Williams | Kadripathi.K.N Yethinder ragav | |
| 10 | Low voltage transformer for improved power efficiency |

|
- | Kadripathi.K.N Yethinder ragav | Design and fabrication of transformer and inductor efficiency |
| 11 | Back EMF sensor for measuring RPM of propeller of UAV |

|
Samuel Vivek Williams | Kadripathi.K.N Yethinder ragav Hruday Kundal Wilbur Gonsalus | Measurement of a Drone Motor RPM Using Back EMF |
| 12 | Launch pad design and fabrication |

|
Amritharaju. V | Rohit R M | Design and fabrication of launching mechanism for a small UAV for un-even ground conditions. Launch pad can be used to improvise these difficulties and provide a stable platform for landing and take-off. |